The Cage automates charging processes for virtually all light UAVs.
We designed the Cage with Parrot Bebop in mind but it can be used to communicate with any drone in its network to autonomously catch, charge and release them while still allowing manual operation in-person through its touchscreen interface or remotely over internet. In the video below, you can see The Cage in action, along with its little brother The Wall which is designed for ground drones.
Sporting a 11” by 14” landing platform, The Cage can both quick charge and balance charge up to 3-cell batteries of LiPo, Li-Ion, LiFe, NiMH, NiCd and Pb chemistry with support for 4A charging. The Cage and The Wall both were designed as part of a senior capstone project for the Boston University Robotics Lab. As a result, we won the Best Senior Capstone award for this project.
The Cage runs on AC power which is regulated to 12V to power the “Sandwich Mechanism” and the commercial batterty charger and also 5V to power the Raspberry Pi and its touchscreen.

Details of this rather simple looking system overview is indeed much more complex.
Enlarge
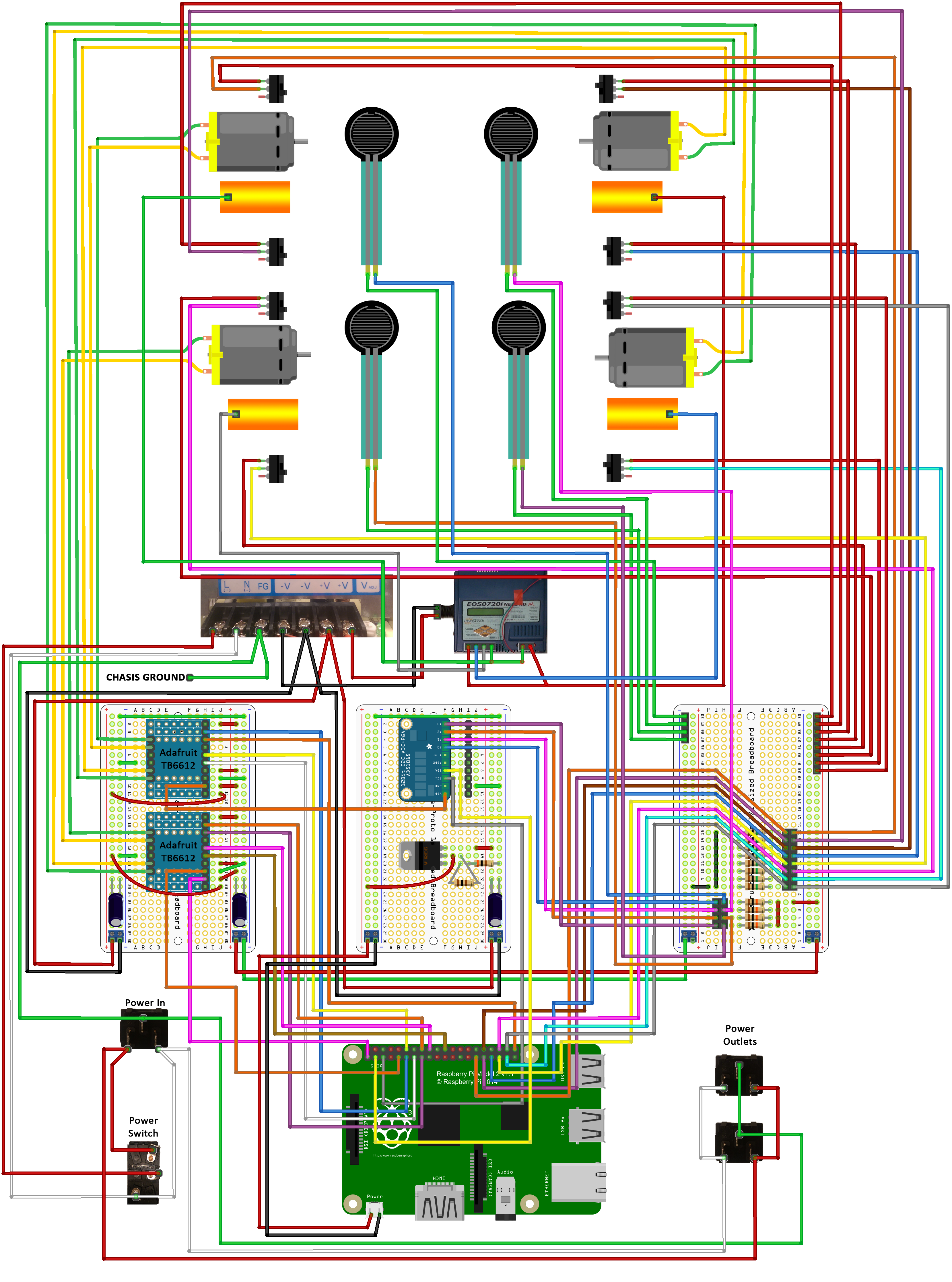
Raspberry Pi acts as the brain of this operation, communicating with drones over WiFi, evaluating sensory data, commanding motors and instructing the commercial battery charger.
Enlarge

The walls that move in on the drone are actuated individually to conform to the drones shape. These modules also contain force sensitive resistors in them which is what The Cage uses to be able to tell if its holding a drone and if so how tightly. It turns out that figuring out how tightly to grip a drone is non trivial but rather simple if you figure out that a tight grip is achieved when two diagonally opposite legs of a drone are caught and motors are stopped immediately. “Charging socks” fitted over each one of the drone’s legs complete the circuit between the charger and the drone’s battery.
A commercial battery charger is controlled via serial over USB and drones are communicated with using Robot Operating System over WiFi. Most of the software runs on Python with Qt used for GUI.
Not counting months of revisions, I wrote ~2000 lines of code for the final version, doing a bunch of things from serial communication to rendering a GUI. Although both my and my teammates’ majors are mechanical engineering, this is a heavily software and electronics dominated project showing how cross-disciplinary our world’s problems are today. A truly electro-mechanical project, The Cage is a fine piece of art and a symbol of good engineering.
It wouldn’t be possible to build these amazing devices without my teammates Benjamin Ha, Samuel Black, Zoe Dickert and Kamiko Darrow. Together we developed, manufactured and tested all of these systems.
You can find our code at GitHub.
Special thanks goes out to our client Boston University Robotics Lab and our senior capstone instructor Professor Enrique Gutierrez Wing.